| Dokumente | |
|
|
Dokumentvorschau |
Zusammenfassung_FAS_Prof.Dr.Ing.M.Maurer_SS2010_v1.0 |
Dokument-Nr.: F-ACT3 |

|
|
Dokument-DownloadUm Zugriff auf dieses Dokument zu erhalten, musst Du Mitglied der UNIDOG Community sein. |
|
Inhalt / Beschreibung
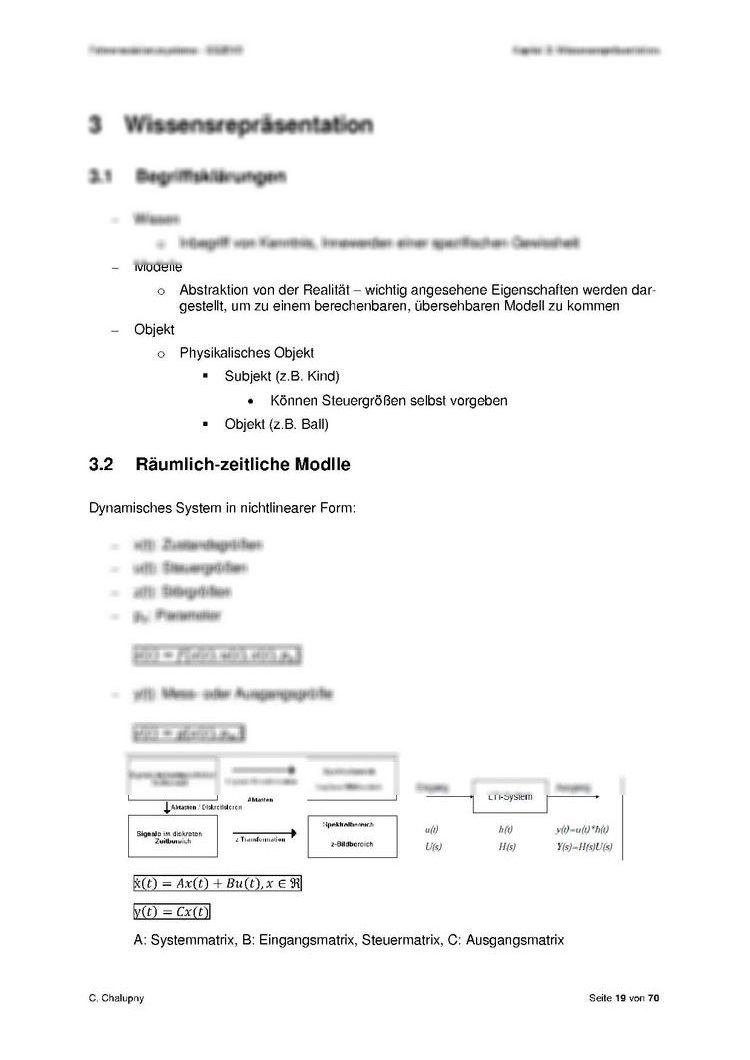
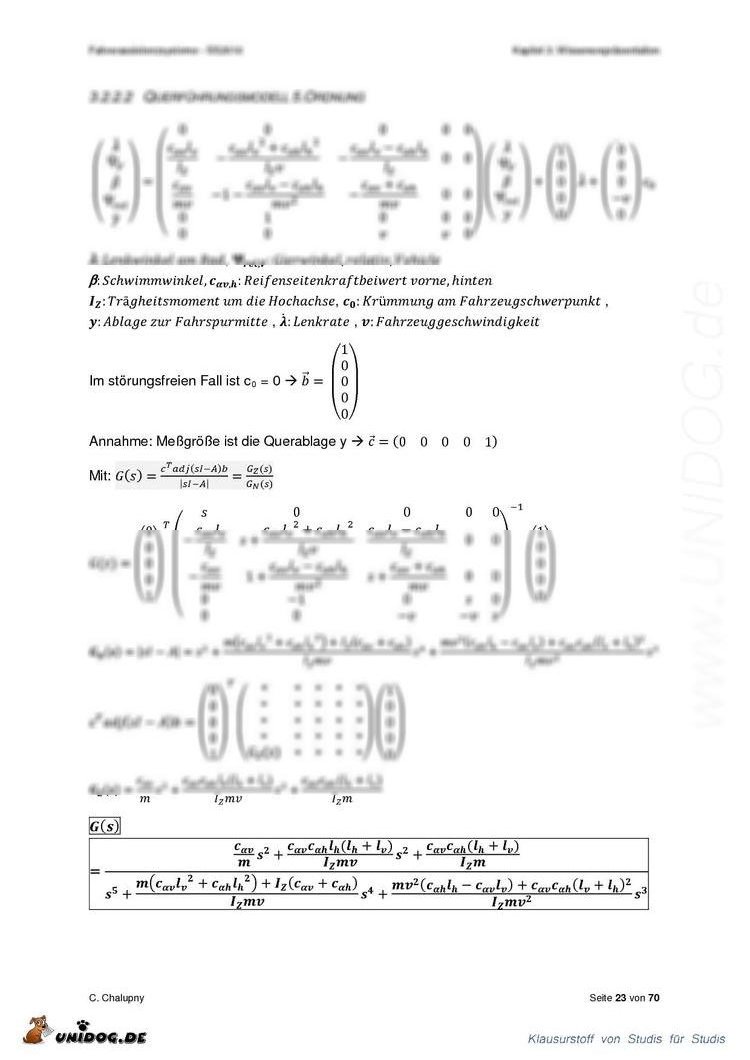
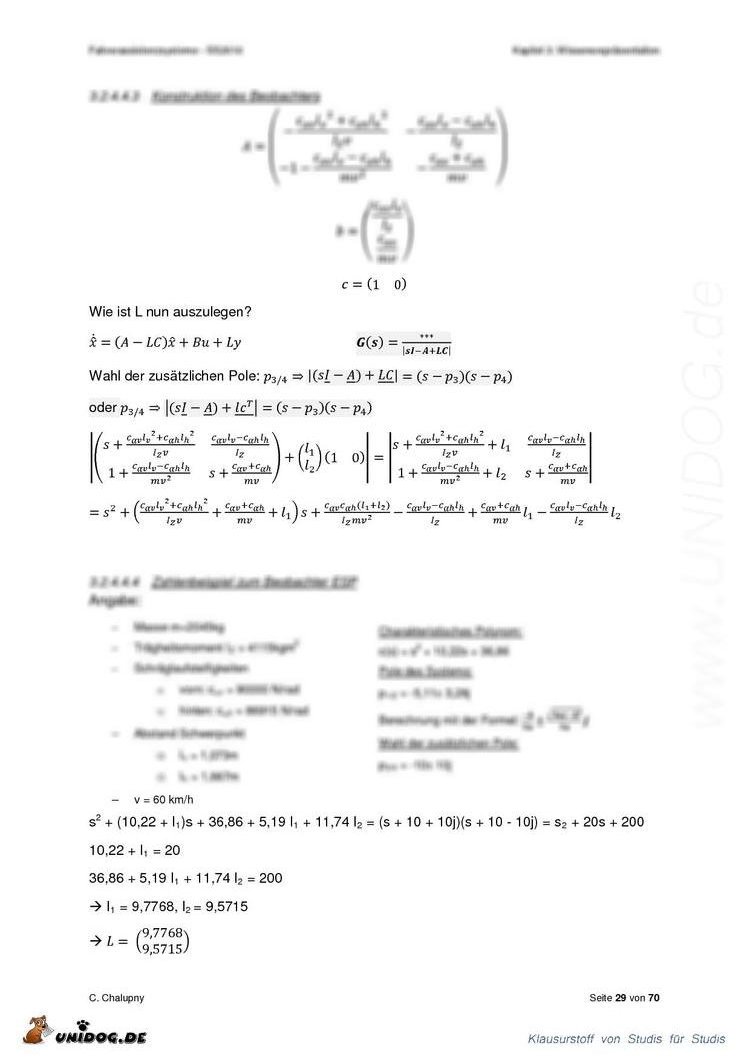
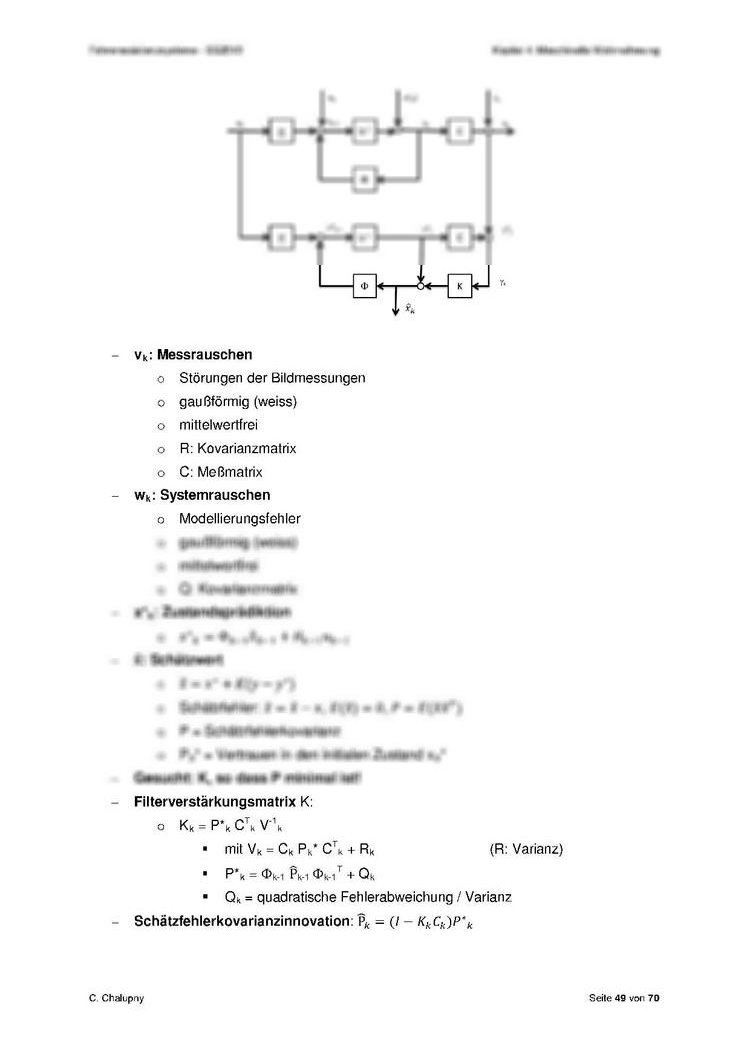
Inhaltsverzeichnis 1 Einleitung und Motivation 6 1.1 Begriffsklärung 6 1.1.1 Klassifizierung von Fahrzeugen 6 1.1.2 Kompensation des Autonomieverlust 6 1.1.3 Fahrer, Assistenz, System 6 1.1.4 Formen der Arbeitsteilung zwischen Mensch und Maschine 6 1.1.5 Mensch-Maschine-System / -Schnittstelle 7 1.1.6 Konventionelle FAS 7 1.1.7 FAS mit maschineller Wahrnehmung 7 1.1.8 Aktive und passive Sicherheit 7 1.1.9 FAS in dieser Vorlesung 7 1.2 Kategorien für FAS 7 1.2.1 Juristische Kategorisierung…nach GdA 7 1.2.2 Kategorisierung…nach Kundenbedürfnissen 8 1.3 Motivation für FAS 8 1.3.1 Motivation für Copilot (Folie 25) 8 1.3.2 Motivation für Autopilot (Folie 39) 9 1.3.3 Motivation für Valet Parking 9 1.3.4 Motivation für Verbesserte Sicht 9 2 Stand der Technik 11 2.1 Roadmap Autopilot – Erhöhter Komfort 11 2.1.1 Derivate von ACC 11 2.1.2 ACC - Funktionsdefinition 11 2.1.3 Spurhalteuntertützung (Heading Control – HC)– Funktionsdefinition 11 2.1.4 Stauunterstützung – ACC Stop and Go – Funktionsdefinition 12 2.2 Roadmap Copilot – Erhöhter Komfort 13 2.2.1 Spurhalteunterstützung 13 2.2.2 Spurwechselassistent 14 2.2.3 Collision Mitigation (CM) & Collision Avoidance (CA) 14 2.2.4 Automatische Notbremsung (ANB) 14 2.3 Roadmap Einparken – Erhöhter Komfort 15 2.4 Roadmap Verbesserte Sicht 16 2.4.1 Advanced Frontlighting System 16 2.4.2 Night Vision 16 2.4.3 Automatisches Fernlicht 17 2.4.4 Verkehrszeichenerkennung 18 3 Wissensrepräsentation 19 3.1 Begriffsklärungen 19 3.2 Räumlich-zeitliche Modlle 19 3.2.1 Lineare kontinuierliche Systeme 20 3.2.1.1 Zustandsgleichung um Frequenzbereich (Laplace Transformiert): 20 3.2.1.2 Übertragungsmatrix G(s) 20 3.2.1.3 Charakteristisches Polynom 20 3.2.1.4 Stabilität 21 3.2.2 Lineares Einspurmodell 22 3.2.2.1 Annahmen 22 3.2.2.2 Querführungsmodell 5.Ordnung 23 3.2.2.3 Querführungsmodell 3.Ordnung 24 3.2.3 Steuerbarkeit und Beobachtbarkeit 24 3.2.3.1 Motivation Steuerbarkeit 24 3.2.3.2 Definition Steuerbarkeit 25 3.2.3.3 Steuerbarkeit – notwendige und hinreichende Bedingung 25 3.2.3.4 Motivation Beobachtbarkeit 25 3.2.3.5 Definition Beobachtbarkeit 25 3.2.3.6 Beobachtbarkeit – notwendige und hinreichende Bedingung 25 3.2.4 Beobachter 26 3.2.4.1 Definition Beobachter 26 3.2.4.2 Luenberger Beobachter 26 3.2.4.3 Beobachter – Pole der G(s) 26 3.2.4.4 ESP Beispiel Auslegung für den Beobachter 27 3.2.5 Lineare zeitdiskrete ereignisorientierte Modelle 30 3.2.5.1 Warum diskrete ereignisorientierte Modelle? 30 3.2.6 Methodisches Vorgehen auf der 4D-Ebene 30 3.3 Diskrete ereignisorientierte Modelle 31 3.3.1 Automaten 31 3.3.2 Zustandskarten 31 3.4 Repräsentation physikalischer Objekte 31 3.4.1 Klothoidenmodell 32 3.4.2 Repräsentation des Ego-Subjekts 32 4 Maschinelle Wahrnehmung 33 4.1 Umfelderfassung mit elektromagnetischen Wellen 33 4.1.1 Erkennbarkeit 33 4.2 Wahrnehmung mit Radar 34 4.2.1 Grundprinzip Radar 34 4.2.2 Reflexion an ideal leitenden Körpern 34 4.2.3 Reflexion an dielektrischen Körpern 35 4.2.4 Frequenzen und Bandbreite 35 4.2.5 Informationsgehalt des Radar Signals 35 4.2.6 Abstandsmessung 36 4.2.7 Geschwindigkeitsmessung 36 4.2.8 Winkelmessung (Richtungsmessung) 36 4.2.9 Radar Antennen 37 4.2.9.1 Strahlbreite 37 4.2.9.2 Monostatic 37 4.2.9.3 Bistatic 37 4.2.10 Nebenkeulen 37 4.2.11 Effekte / Probleme durch Nebenkeulen 38 4.2.12 Objekt Separierung 38 4.2.13 Modulation und Demodulation 38 4.2.14 Modulationsschemas und Auswirkungen der Schemas 39 4.2.15 Frequency Shift Keying 39 4.2.16 FMCW - Dauerstrich-Frequenzmdulation (Frequency Modulated Continuous Wave) 39 4.2.17 Beat Frequenz 42 4.2.18 Fast Chirps (pulse compression) 42 4.2.19 Pulse Doppler 43 4.2.20 Generelle Daten interpretierbar aus einem Radarsensor 43 4.3 Fahrspurprädiktion 44 4.3.1 Vor- und Nachteile der verschiedenen Krümmungsberechnungserfahren 44 4.3.2 Funktionsgrenzen 45 4.4 Maschinele Visuelle Wahrnehmung 45 4.4.1 Rechnersehen 45 4.4.2 Architektur 45 4.4.3 Sensoren – physikalische Prinzipien 45 4.4.3.1 Fotodiode 45 4.4.3.2 Videokamera 46 4.4.3.3 Kennlinien Charakteristik 46 4.4.4 Signalverarbeitung 46 4.4.4.1 Verfahren zur Fahrspurerkennung (3 Verfahren) 47 4.4.4.2 Kantenbasierte Bildfolgenverarbeitung 47 4.4.4.3 Stereobasiertes Verfahren 47 4.4.4.4 Optischer Fluß 48 4.4.5 Generierung von Objekthypothesen 48 4.4.6 Kalman-Filter (Rekursives Schätzverfahren) 48 4.4.6.1 Vollständige Rekursion beim Kalmanfilter 50 4.4.6.2 VORTEILE Kalmanfilter 50 4.4.6.3 NACHTEILE Kalmanfilter 50 4.4.6.4 VORAUSSETZUNG: 50 4.4.6.5 Beispielrechnung – Fusion von Radar- und Videodaten mit Hilfe des Kalmanfilters ohne Dynamikmodell 51 4.4.7 Zusammenfassung Visuelle Wahrnehmung 52 4.5 Sensordatenfusion 52 4.5.1 WH: Funktionsgrenzen ACC und Fusion mit Video - Vorteile 52 4.5.2 Sensordatenfusion – Modifikationen 53 5 Maschinelle Verhaltensgenerierung und Verhaltensentscheidung 54 6 Mensch-Maschine-Interaktion 55 6.1 Konzepte 55 6.1.1 Drei-Ebenen-Modell nach Rasmussen: 56 6.1.1.1 Skill based / Fertigkeitsbasiertes Verhalten 56 6.1.1.2 Rule based / Regelbasiertes Verhalten 56 6.1.1.3 Knowledge based / Wissensbasiertes Verhalten 56 6.1.1.4 Signale 57 6.1.1.5 Zeichen 57 6.1.1.6 Symbole 57 6.1.2 Ebene der Unterstützung 57 6.1.2.1 Ebenen Modell von Donges & Naab (derived from Rasmussen) 57 6.1.2.2 Einteilung der FAS nach Ebene der Fahraufgabe und Grad der Fahrunterstützung 58 6.1.3 Ironie der Automatisierung 58 6.1.4 Aufmerksamkeit, Wahrnehmung, Workload 58 6.1.4.1 Aufmerksamkeit 58 6.1.4.2 Suchscheinwerfer Metapher 59 6.1.4.3 Ressourcen Metapher 59 6.1.4.4 Time-Sharing 59 6.1.4.5 Wickens „Multiple Resource Theory“ 59 6.1.4.6 Workload und Workload-Inices 59 6.1.4.7 Methoden zur Messung der Workload 60 6.1.5 Vigilanz 60 6.1.6 Situationsbewusstsein 60 6.1.7 Nutzertransparenz 60 6.2 Auswirkung der Teilautomation 61 6.2.1 am Bsp. ACC 61 6.2.2 Wirkung von ersetzender und warnender Assistenz 61 6.3 Mensch-Maschine-Schnittstelle 62 7 Systematischer Entwurf von FAS 64 7.1 Systematische Konzeptentwicklung 64 8 Risiko Management 68 9 Glossar 69
|
Dokumentbewertung (4)
Kommentare
Dokument empfehlen

|
||||||||||||||||||||||||
|
Vorschau-Ausschnitte
|
|||||||